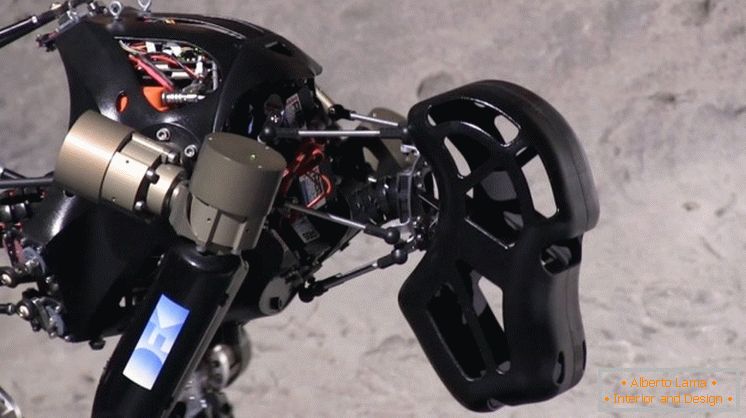
O Centro Alemão de Pesquisa de Inteligência Artificial (DFKI) e a Universidade de Bremen estão trabalhando no robô símio iStruct Demonstrator, ele é classificado como um "robô espacial". Agora os macacos mecânicos passam por testes de caminhada e equilíbrio em condições próximas ao relevo da lua.

O estudo de superfícies lunares perigosas requer o uso de várias formas de movimento, e os pesquisadores da DFKI estudam suas capacidades (incluindo uma combinação de pernas, rodas e lagartas). Robôs semelhantes a macacos têm certas vantagens em relação ao suporte de quatro pontos com rodas, permitindo que você crie uma posição mais estável ao escalar obstáculos ou terreno montanhoso. O robô pode se equilibrar em suas patas traseiras para liberar os membros anteriores para realizar qualquer ação.

Com novos interesses internacionais na missão lunar, existe a possibilidade de que o iStruct (ou um dos seus descendentes) possa visitar a lua. A colonização da Lua por robôs começará com um desenvolvimento que pode se desenvolver e reagir razoavelmente em qualquer situação atual, e o objetivo do projeto é construir "inteligência artificial avançada" e um sistema robótico que possa aprender e navegar por aí.
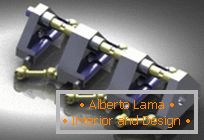
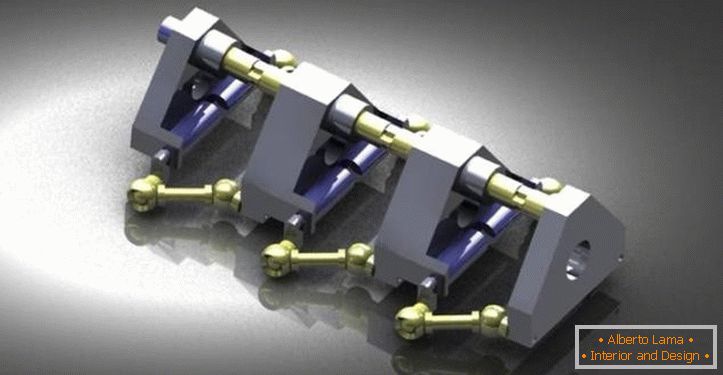
O robô possui uma espinha articulada que conecta o tronco e a pélvis, dando-lhe maior flexibilidade, bem como um sensor de carga para o pé e tornozelo que reage quando em contato com o solo.
Outras características incluem:
- 43 motores independentes;
- Seis sensores FSR adicionais em partes abertas usados para detectar obstáculos;
- Sensor de torque de 6 eixos;
- Acelerômetro digital de 3 eixos, para perceber a orientação do pé no espaço;
- Dois sensores de temperatura para compensar as mudanças de temperatura na eletrônica;
- Sensor magnético digital para controle angular de cada eixo móvel da articulação do pé e tornozelo;
A maioria dos robôs já contém muitos desses sensores, mas a coluna iStruct articulada (que pode funcionar como um transdutor de torque de 6 eixos) é uma espécie de raridade para robôs locomotores que ajudam no movimento de quatro. Sensores nas articulações do pé e do tornozelo permitirão que ele mantenha o equilíbrio em uma superfície inclinada.
Em 2008 e 2009, um engenheiro de pós-graduação Daniel Kuhn trabalhou em um robô semelhante. Um pequeno macaco que era capaz de andar de quatro patas simples. Após este projeto, ele começou a trabalhar no iStruct, que possui várias atualizações significativas. Este é um peso muito maior, 18 kg (40 libras) e dimensões de 66 x 43 x 75 cm (26 x 17 x 29 polegadas), e também contém 26 graus de liberdade, e alimentado por vários motores elétricos. O projeto deve ser concluído em agosto deste ano.
Você pode ver como ele usa seus pés e tornozelos intelectuais ao andar e manter o equilíbrio no vídeo abaixo. Este é um pequeno passo para um robô macaco, mas potencialmente um salto gigante para toda a robótica de design similar.
Andando
Balanceamento
Total da Galeria de Fotos | Imagens de 14